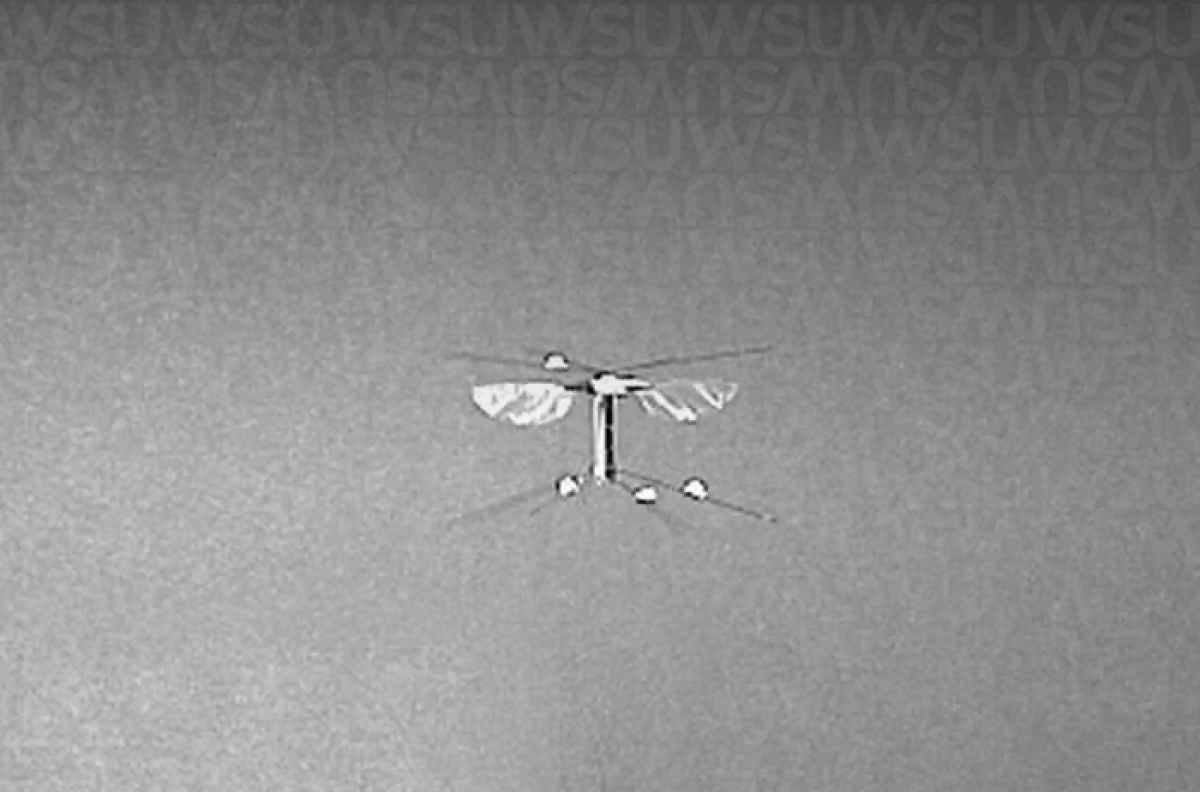
With four wings made out of carbon fiber and mylar as well as four light-weight actuators to control each wing, the Bee++ prototype is the first to fly stably in all directions. CREDIT: WSU
PULLMAN, Wash. — You may soon find a robotic bee in your flower garden thanks to the work of a team from Washington State University. They assembled the first-ever bee model which is capable of flying in all directions. As real bees disappear from the environment, these robots could step in to pollinate plants.
The robotic bee’s wings are made up of carbon fiber and a polyester film called mylar. Four on-off switches control each wing. In addition to flying stably, the bee is capable of a twisting motion called yaw. In total, the bee can achieve six degrees of free movement similar to the typical flying insect.
Creating artificial flying insects has been an interest of Néstor Pérez-Arancibia for over 30 years. As an associate professor in Washington State University’s school of mechanical and materials engineering, his goal was to design robotic bees capable of artificial pollination, search-and-rescue efforts in tight spaces, biological research, and monitoring hostile environments.
One reason why it’s taken so long to design this tiny robot is the complex number of controls needed to help it take off and land. Essentially, engineers would need to create an insect brain from scratch.
“It’s a mixture of robotic design and control. Control is highly mathematical, and you design a sort of artificial brain. Some people call it the hidden technology, but without those simple brains, nothing would work,” explains Pérez-Arancibia in a university release.
The first bee prototype had two wings but was limited in motion. In 2019, the team updated the model to build a four-winged robot light enough to take off. To create two maneuvers known as pitching or rolling, the researchers designed the front wings to flap differently than the back wings. Additionally, the right wings flapped a different way than the left for rolling. These diverse motions created a turning force that rotates the robot.
While the latest robot had more range of motion, scientists would need some way to control the power of the turning force. Without it, robots would not be able to focus on a single point, spin out of control, and crash.
“If you can’t control yaw, you’re super limited. If you’re a bee, here is the flower, but if you can’t control the yaw, you are spinning all the time as you try to get there,” says Pérez-Arancibia.
A robotic bee that could move in all sorts of directions is important in evasion and in tracking objects.
“The system is highly unstable, and the problem is super hard,” says Pérez-Arancibia. “For many years, people had theoretical ideas about how to control yaw, but nobody could achieve it due to actuation limitations.”
To create a robot that would twist in a controlled manner, the team modeled their designs off the movements of real-life insects. For example, they moved the wings so that they would flap in an angled plane. They also extended the amount of times per second the robot flapped its wings from 100 to 160 times per second.
“Part of the solution was the physical design of the robot, and we also invented a new design for the controller—the brain that tells the robot what to do,” adds Pérez-Arancibia.
At 95 milligrams, and with a 33-millimeter wingspan, the bee is larger than real bees, which weigh around 10 milligrams. Additionally, the robo-insects can only fly autonomously for about five minutes at a time and currently needs a connection to a power source through a cable. The next step is to develop other insect robots, including those that can travel through water.
The study is published in IEEE Transactions on Robotics.







