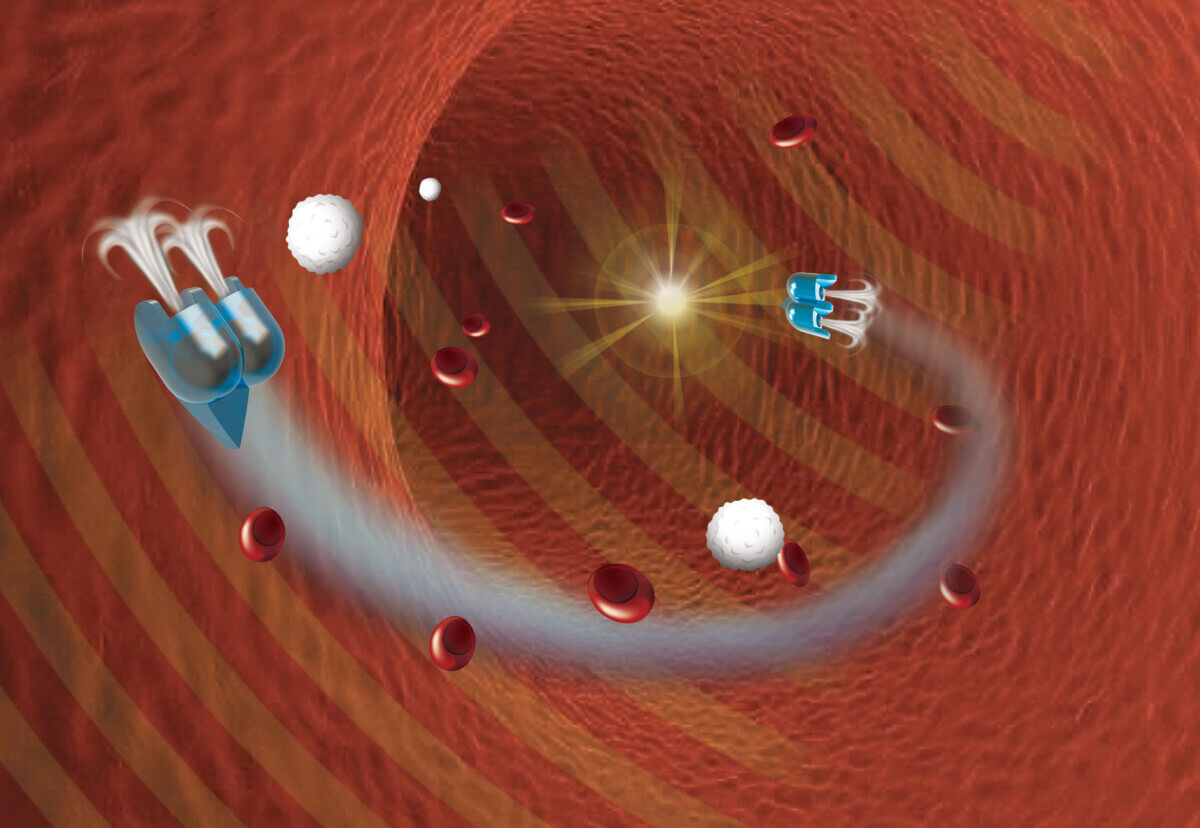
Cornell University scientists have created cell-sized swimming robots that can be steered by ultrasound waves.
ITHACA, N.Y. — Tiny swimming micro-robots that can provide internal treatments to humans have been created by scientists. Using a design inspired by bacteria and sperm, they can be moved through the body using ultrasound to help deliver drugs to specific areas. The cell-sized “rocket ships” are powered and steered by high-frequency sound waves.
Creating a remote-controlled robot that can navigate the human body has proved challenging, partly because it cannot carry a battery. Now researchers at Cornell University have come up with a solution after studying ways microorganisms propel themselves for over a decade.
“We have been investigating the ways microorganisms, from bacteria to cancer cells, migrate and communicate with their environment. Despite their tiny size, these micro-robotic swimmers, whose movements were inspired by bacteria and sperm, could one day be a formidable new tool for targeted drug delivery,” explains author Mingming Wu, professor of biological and environmental engineering in the College of Agriculture and Life Sciences at Cornell, in a statement.
To begin with, the researchers tried designing and 3D-printing robots which mimicked the way bacteria use their tails, known as flagellum, to propel themselves. But their efforts collapsed. The main hurdle was finding a way of powering the tiny robots, which must be energized before they can start swimming.
“Bacteria and sperm basically consume organic material in the surrounding fluid, and that is sufficient to power them. But for engineered robots, it’s tough, because if they carry a battery, it’s too heavy for them to move,” says Wu.
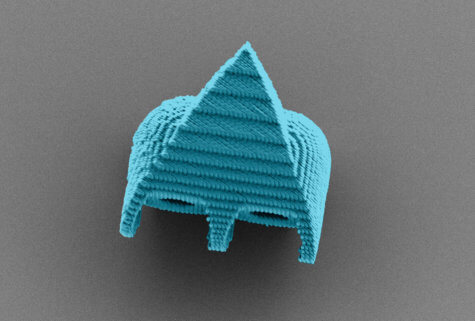
One promising option was to use high-frequency sound waves given they have been deemed safe for clinical studies by the Food and Drug Administration and are quiet, making them easy to use in laboratory experiments. A triangular micro-robotic swimmer, which looks like an “insect crossed with a rocket ship,” was created by the researchers. Its most important feature is a pair of cavities on its back made to repel water via hydrophobic resin.
Once the swimmer is submerged, an air bubble automatically forms and becomes trapped in each of these cavities. These bubbles begin to oscillate when exposed to ultrasound, producing vortices, also known as streaming flow, which propels the robot forward. While engineers have successfully made “single bubble” swimming robots before, this is the first time a version has been created with two of them.
Researchers say the next challenge is making the robots biocompatible so they can navigate blood cells that are about the same size. They will also be made from biodegradable material allowing many bots to be dispatched at once. Just like how a single sperm cell is needed for fertilization, for a robot to carry out its mission, volume is key.
“For drug delivery, you could have a group of micro-robotic swimmers, and if one failed during the journey, that’s not a problem. That’s how nature survives. In a way, it’s a more robust system. Smaller does not mean weaker. A group of them is undefeatable. I feel like these nature-inspired tools typically are more sustainable because nature has proved it works,” concludes Wu.
The findings are published in the Royal Society of Chemistry’s journal Lab on a Chip.
South West News Service writer Tom Campbell contributed to this report.







