
Golfi the robot making a putt. (Credit: Paderborn University)
PADERBORN, Germany — Watch out Tiger Woods, a robo-golfer could be set to make human golfers look sub-par. Researchers in Germany have developed “Golfi,” a self-learning robot able to make perfect putts.
A team at Paderborn University used data-driven and physics-based methods to have the robot autonomously learn to sink the golf balls from an arbitrary point on the green. Rather than sending the club-wielding bot onto the golfing circuit, however, scientists created Golfi to demonstrate how robots might assist humans in daily life.
“With the aid of autonomous robots, the everyday life of many people should be made easier in the near future, e.g., by supporting work in the care of elderly or physically impaired people. For this, a prudent action of the autonomous robot is essential,” the study authors write, according to a statement from SWNS.
“We have included these aspects in our research work and want to develop them further in the context of an autonomous golf robot as an illustrative example. For an autonomous golf game in the area of the hole, some challenges have to be overcome, e.g., sophisticated environment recognition and precise actuation.”
“Even for skilled humans, putting is not always successful. To be able to meet these requirements, in this paper we use both powerful data-driven methods and established physics-based methods from the control engineering context,” the team continues. “A hybrid approach is extremely beneficial to optimally utilize the advantages from both areas.”
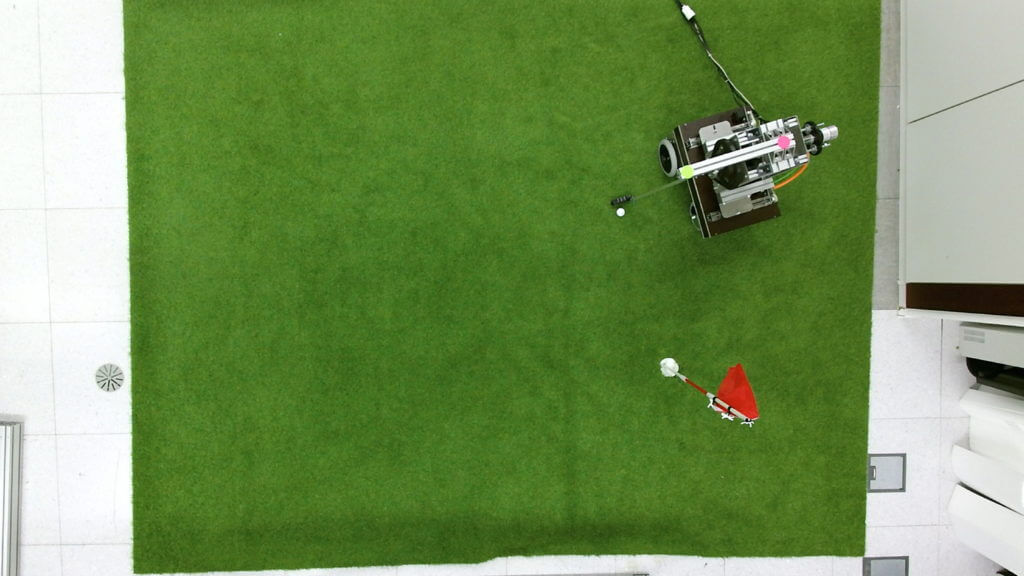
The system works by calculating the positions of Golfi, the ball, the hole, and the shape of the green surface. The physical situation is captured by 3D camera and combined with data-crunching software to calculate the required stroke velocity vector to putt the ball into the hole.
From the camera recording, the green surface is approximated, and model-based training data is generated by simulating 3,000 training strokes from random points at random velocities within the valid range of the green. However, even robots cannot perfect golf just yet, with engineering source IEEE Spectrum reporting that Golfi is successful “6 or 7 times out of 10.”
Also, pro golfers do not need to worry just yet as Golfi has one other drawback — it has not yet mastered hilly terrain. (Not to mention you could also buy the best golf balls!)

“Without hills on the surface, Golfi performed well in moving autonomously to the ball and hitting it towards the hole,” the researchers say, according to SWNS.
“In our work so far, we have limited ourselves to a situation where the green has no hills, but we have already demonstrated the feasibility of our method for a hilly green in a model-based manner.”
“The next step is to evaluate these results on a hilly green in our laboratory. For this purpose, the drive unit may no longer be sufficient and the fine traversing unit may be used as well,” the team concludes.
Researchers Annika Junker, Niklas Fittkau, Julia Timmermann, and Ansgar Trächtler presented Golfi at the 2022 IEEE International Conference on Robotic Computing.
Report by South West News Service writer Dean Murray







