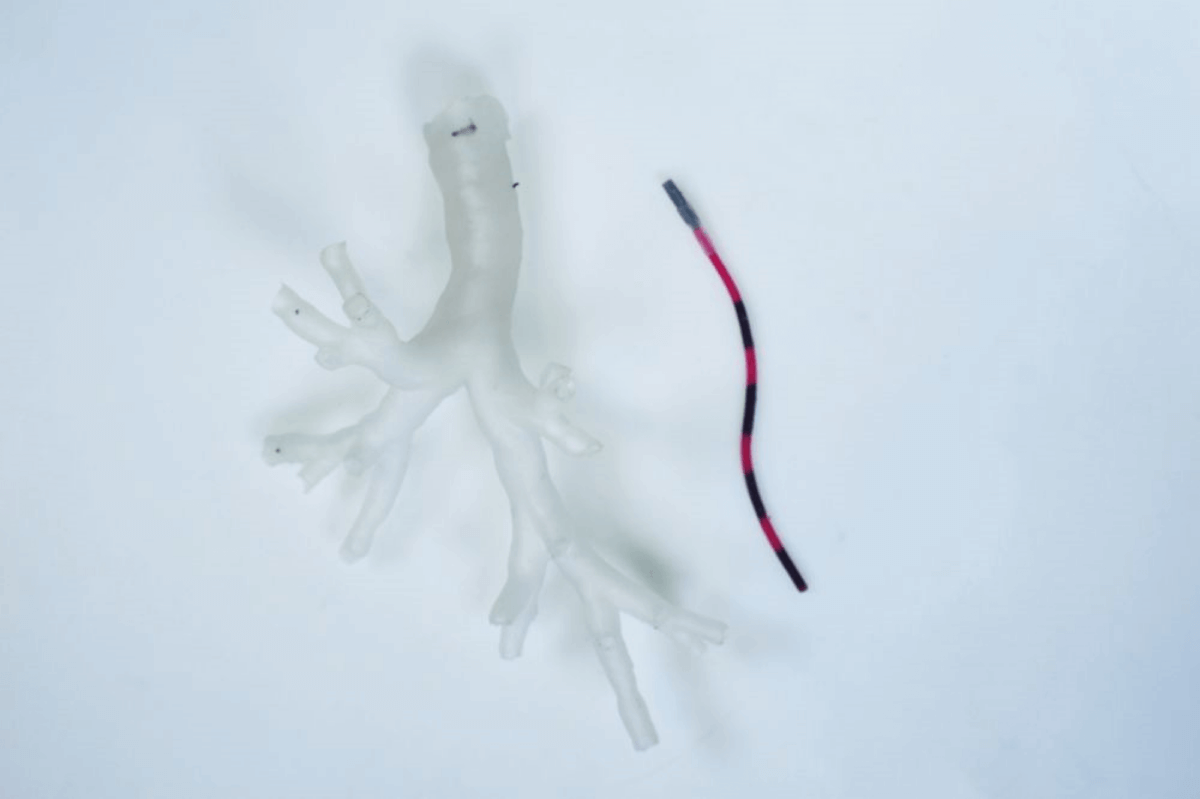
Close-up of a magnetic tentacle robot next to a phantom bronchiole (Credit: University of Leeds)
LEEDS, United Kingdom — A tiny robot that looks like a worm can traverse deep into the lungs to detect and treat early signs of cancer. Scientists at the University of Leeds say this technology, reminiscent of the “Fantastic Voyage,” measures a mere 0.08 inches in diameter. Controlled by magnets, this ultra-soft device can access some of the smallest bronchial tubes in the body. Scientists believe the new invention could revolutionize lung cancer treatment by providing a more precise, customized, and significantly less invasive approach.
This innovation was produced by a team of engineers, scientists, and doctors at the STORM Lab in Leeds. The researchers tested the magnetic, tentacle-like robot on a cadaver’s lungs, discovering that it could travel 37 percent deeper than conventional equipment, while also causing less tissue damage.
“This is a really exciting development, says Professor Pietro Valdastri,” a research supervisor and Director of the STORM Lab, in a university release.
“This new approach has the advantage of being specific to the anatomy, softer than the anatomy and fully shape-controllable via magnetics. These three main features have the potential to revolutionize navigation inside the body.”
Lung cancer has the highest mortality rate among cancers worldwide. Surgery is the conventional method of treatment, often resulting in the significant removal of tissue. Lung cancer screening programs have improved survival rates but have also underscored the need for non-invasive methods to diagnose and treat patients more quickly.
The team at Leeds proposes that the magnetic tentacle robot, besides enhancing navigation during lung biopsies, could enable far less invasive treatment. This would allow medical professionals to target only malignant cells, preserving healthy tissue and organs.
“Our goal was, and is, to bring curative aid with minimal pain for the patient,” adds the report’s co-author, Dr. Giovanni Pittiglio, who carried out the research while conducting his PHD in the School of Electronic and Electrical Engineering.
“Remote magnetic actuation enabled us to do this using ultra-soft tentacles which can reach deeper, while shaping to the anatomy and reducing trauma.”
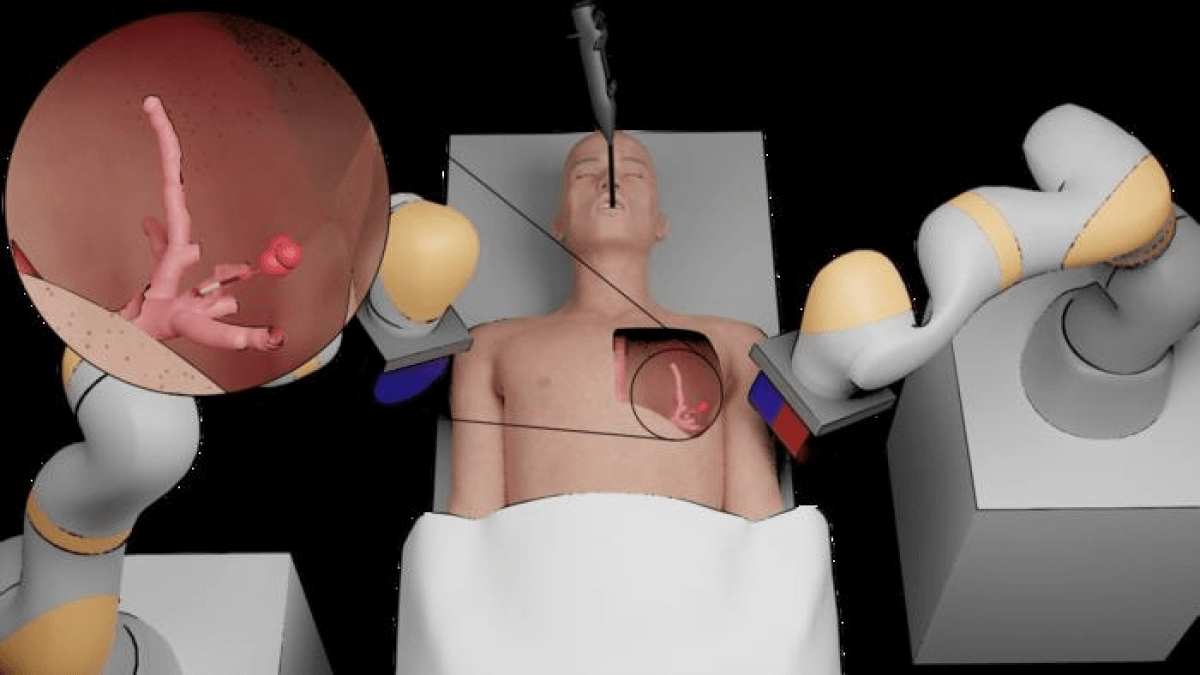
The researchers now aim to collect the data necessary to initiate human trials. They are also exploring methods of controlling two independent magnetic robots simultaneously, enabling one to maneuver a camera and the other to guide a laser to remove tumors.
The devices, constructed of silicone to minimize tissue damage, are navigated by magnets affixed to robotic arms outside the patient’s body. Using a skull replica, the team successfully tested the use of two robots in performing endonasal brain surgery. This technique allows a surgeon to operate on the front of the brain and the top of the spine through the nose.

The team needed the magnetic robots to operate independently. Under normal circumstances, two magnets placed closely together would attract each other, presenting a challenge. This obstacle was overcome by designing the tentacles to bend only in specific directions and by repositioning the north and south poles within each magnetic robot tentacle.
They were then able to simulate the removal of a benign tumor on the pituitary gland at the base of the skull, proving for the first time that it is possible to control two of these robots in one confined area of the body.
The findings of their research are published in the journal Nature Engineering Communications.
“This is a significant contribution to the field of magnetically controlled robotics,” notes the paper’s lead author, Zaneta Koszowska, a researcher in Leeds’ School of Electronic and Electrical Engineering. “Our findings show that diagnostic procedures with a camera, as well as full surgical procedures, can be performed in small anatomical spaces.”
South West News Service writer Stephen Beech contributed to this report.







