
Image montage of the soft robotic hand )holding objects. (Credit: ETH Zurich / Thomas Buchner
ZURICH, Switzerland — For the first time, scientists have created a robotic hand complete with bones, ligaments, and tendons using advanced 3D printing technology. In a significant leap for soft robotics, scientists harnessed a novel technology that integrates 3D printing with a laser scanner and a feedback loop.
A United States-based startup is now commercializing this technology, printing complex objects upon request. The breakthrough extends 3D printing capabilities beyond fast-curing plastics to include slow-curing plastics, which boast superior elasticity, durability, and robustness.
This advancement is credited to the collaborative efforts of researchers at ETH Zurich in Switzerland and the startup company, enabling the creation of intricate, long-lasting robots from various high-grade materials in a single process.
The technology also simplifies the blending of materials with different levels of softness and rigidity. It allows the construction of delicate structures and components with internal cavities according to specific requirements.
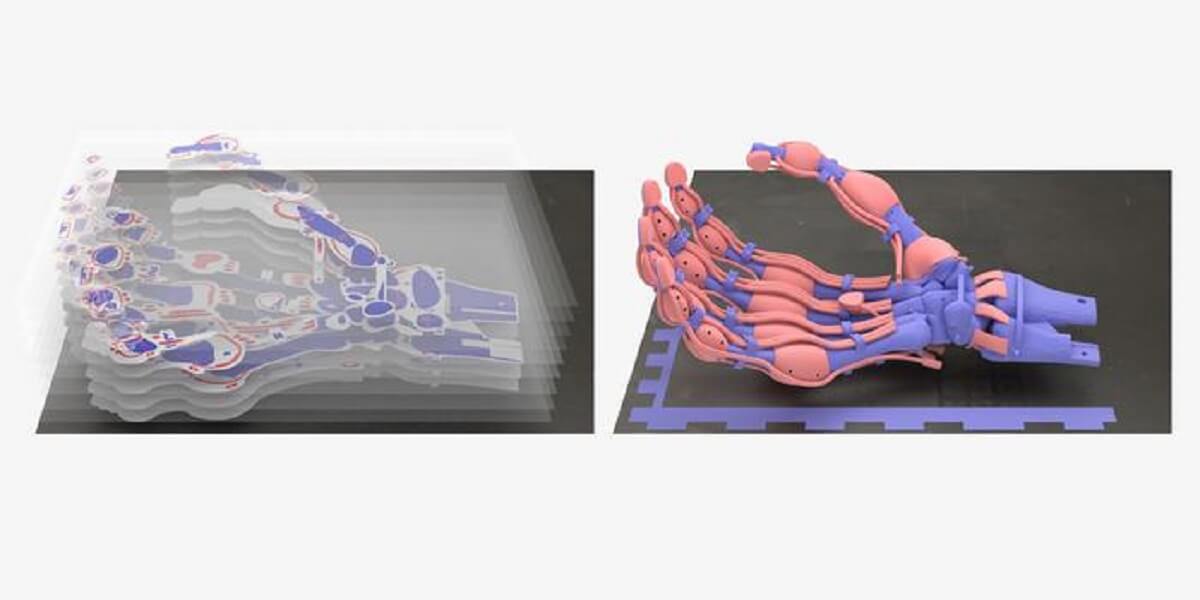
Employing this innovative approach, ETH Zurich scientists were able to successfully print a robotic hand with distinct polymer-based bones, ligaments, and tendons in a single operation.
“We wouldn’t have been able to make this hand with the fast-curing polyacrylates we’ve been using in 3D printing so far,” Thomas Buchner, the study’s lead author and a doctoral candidate in the robotics group at ETH Zurich, in a media release. “We’re now using slow-curing thiolene polymers. These have very good elastic properties and return to their original state much faster after bending than polyacrylates.”
These thiolene polymers are particularly suitable for fabricating the elastic ligaments of the robotic limb. The researchers note that the hardness of the thiolene materials could be precisely adjusted, which is beneficial for soft robotics.
“Robots made of soft materials, such as the hand we developed, have advantages over conventional robots made of metal. Because they’re soft, there is less risk of injury when they work with humans, and they are better suited to handling fragile goods,” says Prof. Robert Katzschmann.
Typically, 3D printers create objects in successive layers: nozzles dispense material in a viscous state at each required location, followed by immediate UV light curing. To incorporate slow-curing polymers, the researchers advanced the 3D printing process with a 3D laser scanner that instantly detects any surface anomalies in each printed layer.
“A feedback mechanism compensates for these irregularities when printing the next layer by calculating any necessary adjustments to the amount of material to be printed in real time and with pinpoint accuracy,” co-author Prof. Wojciech Matusik from MIT elaborates.
Instead of rectifying uneven layers post-printing, the new method accounts for any irregularities in the subsequent layer’s printing. Inkbit, the startup from MIT, has been instrumental in developing this printing technology.
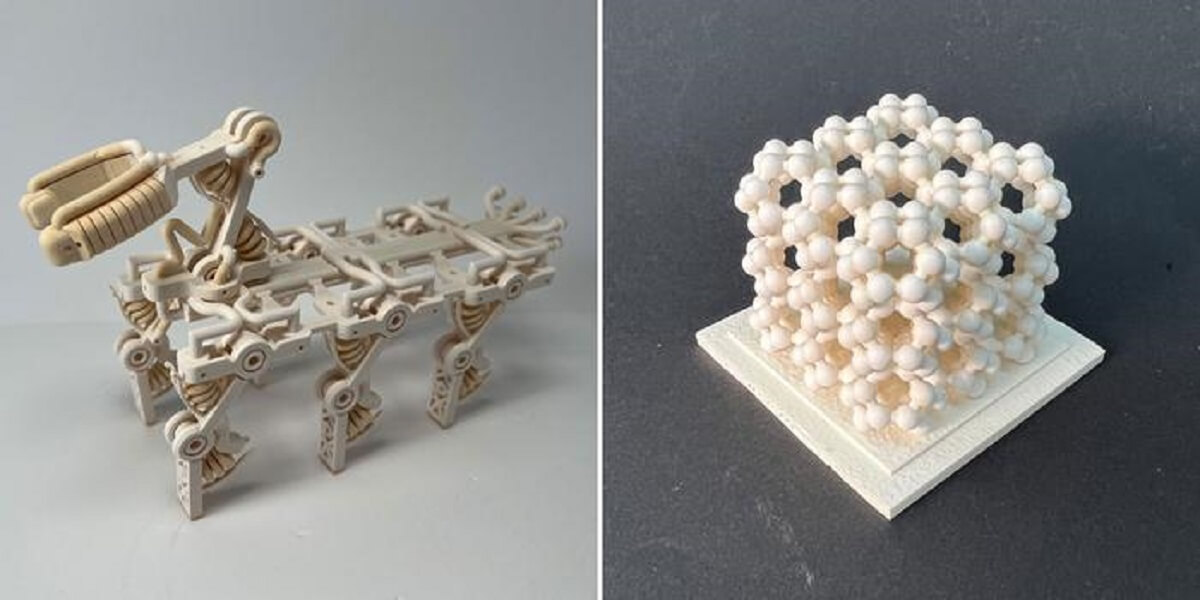
The researchers from ETH Zurich have developed multiple robotic applications and fine-tuned the technology to accommodate slow-curing polymers. They now intend to further explore the technology’s capabilities, designing more complex structures and discovering additional uses.
Inkbit plans to harness this technology to provide a 3D printing service to clients and to market the new printers.
The study is published in the journal Nature.
You might also be interested in:
- Best 3D Printers For 2023: Top 5 Devices Most Recommended By Experts
- Student with no fingers invents prosthetic hand for just $25 — using a 3D printer
- ‘Real bionic woman’ becomes first person to have prosthetic limb fully merged with her body
South West News Service writer Stephen Beech contributed to this report.







